
- ・何か面白いものを作ってみよう (動かしてみよう)
- ・プログラミングを通して問題解決能力を身につけよう
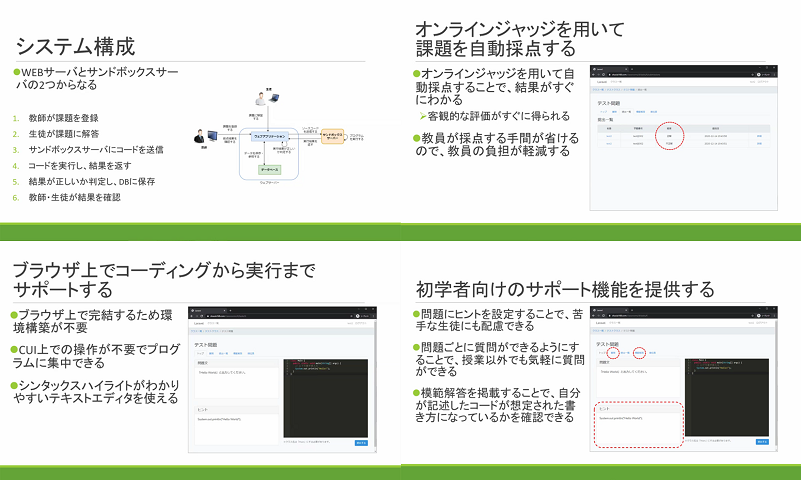
- ・基本的な情報技術に関する知識を習得しよう
- ・積極的に学外のイベントに参加しよう
[トップページに戻る] [プロフィール] [研究業績] [講義・演習] [卒業研究の進め方] [ゼミ紹介][卒論タイトル紹介] [道具箱]
|
|
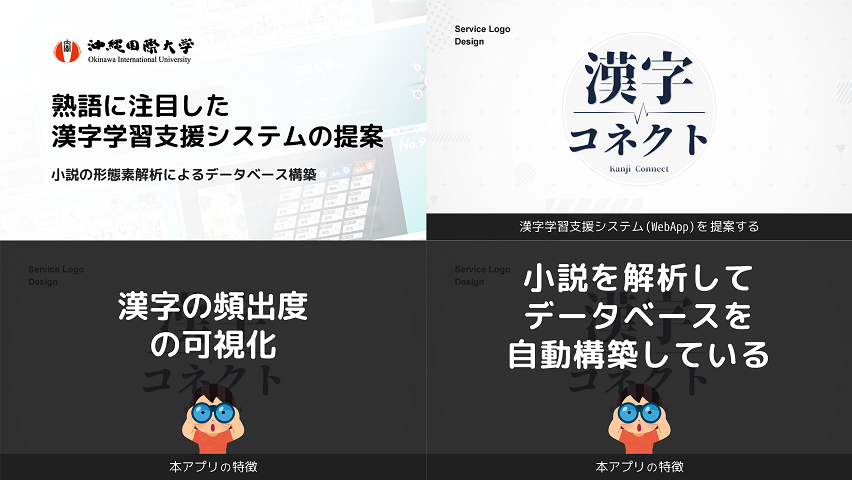
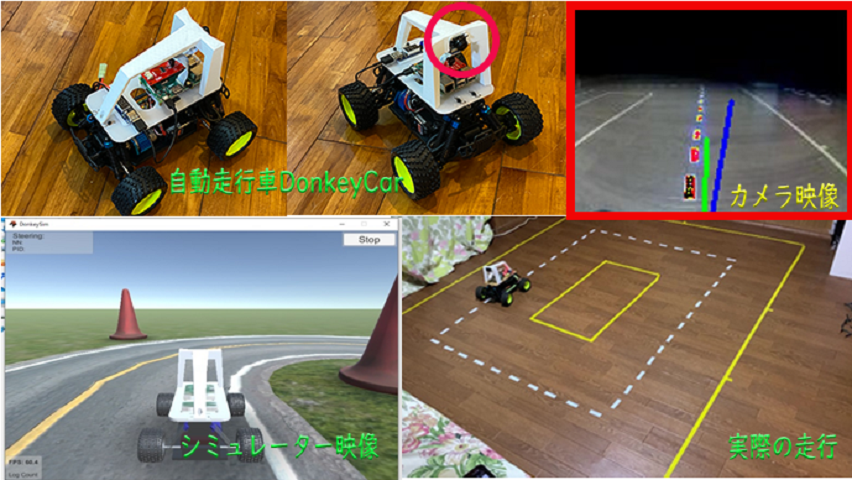
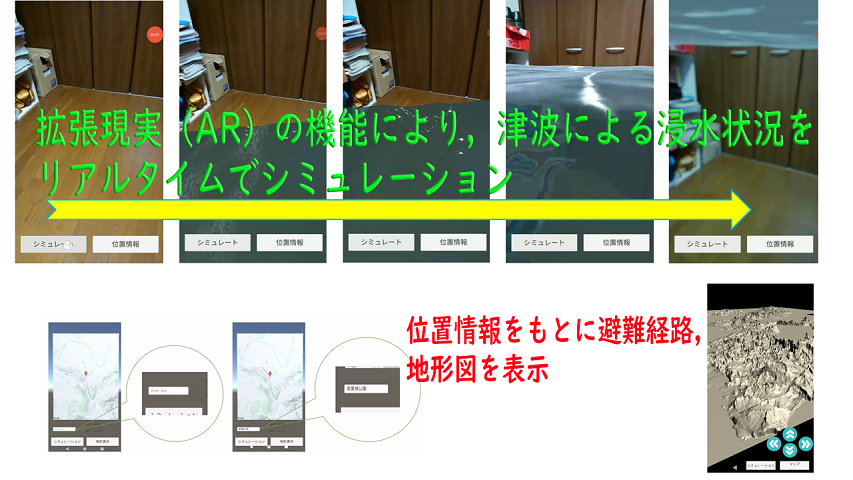
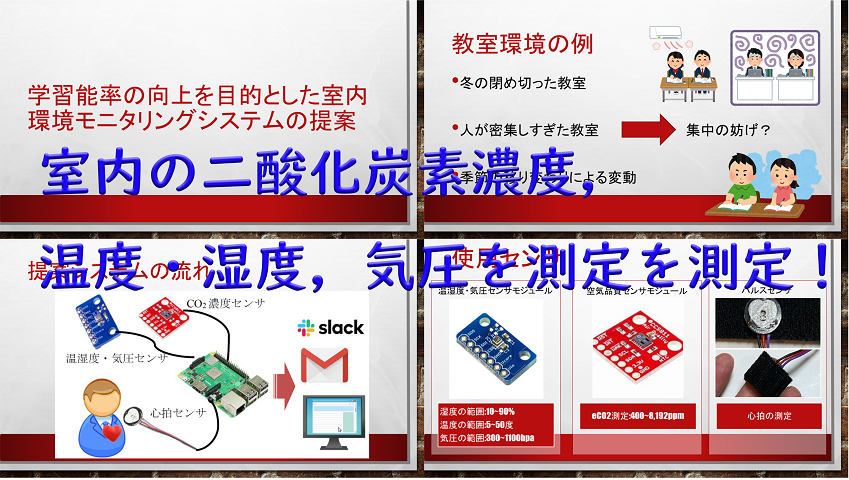
卒研テーマとしてxR(VR/AR/MR),アプリ開発,IoT,ロボット制御,機械学習,生体計測,教育支援など,幅広く対象としています

ProgateによるPythonコース.資格対策(マルチメディア検定ベーシック,ITパスポート試験)
必須:ITパスポート合格,または,マルチメディア検定ベーシック合格 Pythonによるプログラミングの基礎,データ処理,画像処理について学びます.最終課題は,各自でテーマを決め作成した作品をゼミで発表・議論します.
|
|
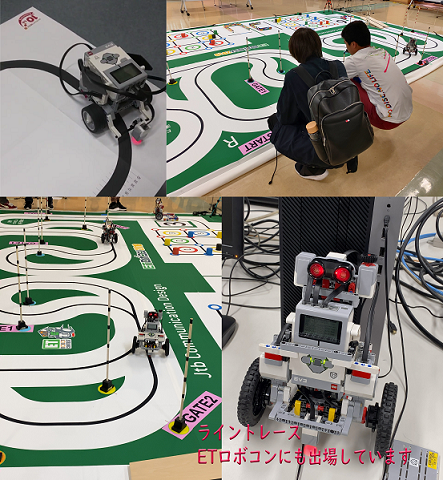
研究のためのICTの活用方法について学び,卒論の個別テーマを決めます.また,「ETロボコン」「ラズパイコンテスト」のどちらかに参加してもらいます.
卒業論文作成.学外勉強会・研究会に参加・発表
ゼミや講義の受講生を中心にロボット班(ETロボコンに参加する学生),画像処理班(PRMUアルゴリズムコンテスト,外観検査アルゴリズムコンテストに参加する学生)を編制し,それぞれ夏期休暇中もシステム開発に取り組み,上位入賞目指して頑張っています.ETロボコンチームは,2013年はIT津梁まつりのETロボコン部門で準優勝,2013年のETロボコン地区大会はでは総合3位入賞をはたしています.
積極的に学外のイベントに参加しようということで,ETロボコン,画像処理コンテスト以外にも各種コンテストへの参加,また,研究会での研究成果の発表を行っています.

さまざまな機材(ガジェット)を使うことができます.





 例1:専門演習基礎(2012年度)「niconicoAR~そして投稿へ~」:カメラで写した映像に文字を入れて某動画サイト風にARマーカーを認識させる
例1:専門演習基礎(2012年度)「niconicoAR~そして投稿へ~」:カメラで写した映像に文字を入れて某動画サイト風にARマーカーを認識させる 例2:専門演習基礎(2013年度)「kinect4ルミネス」:Kinectで人物を識別し、その動きに合わせて映像と音楽を提供する
例2:専門演習基礎(2013年度)「kinect4ルミネス」:Kinectで人物を識別し、その動きに合わせて映像と音楽を提供する